
Die Hardware
Bereits in meinem letzten Post habe ich ausführlich erklärt, was man benötigt, und, wie man die Dinge korrekt verbindet. Deshalb hier nur noch eine Kurzfassung:Für die Verwendung des Smart Car Chassis (hier auf Amazon
Dadurch hat man pro Motor drei Verbindungskabel zum Arduino. Eins zum Steuern der Stärke durch ein PWM Signal, und die anderen beiden zum Steuern der Richtung. Dabei wird durch das HIGH schalten einer der beiden Pins die Richtung bestimmt. Die Verkabelung eines L293D, habe ich hier ausführlich beschrieben.
Um einer Linien zu folgen, benötigt man einen KY 033 Infrarot Linien Detektor (hier auf Amazon
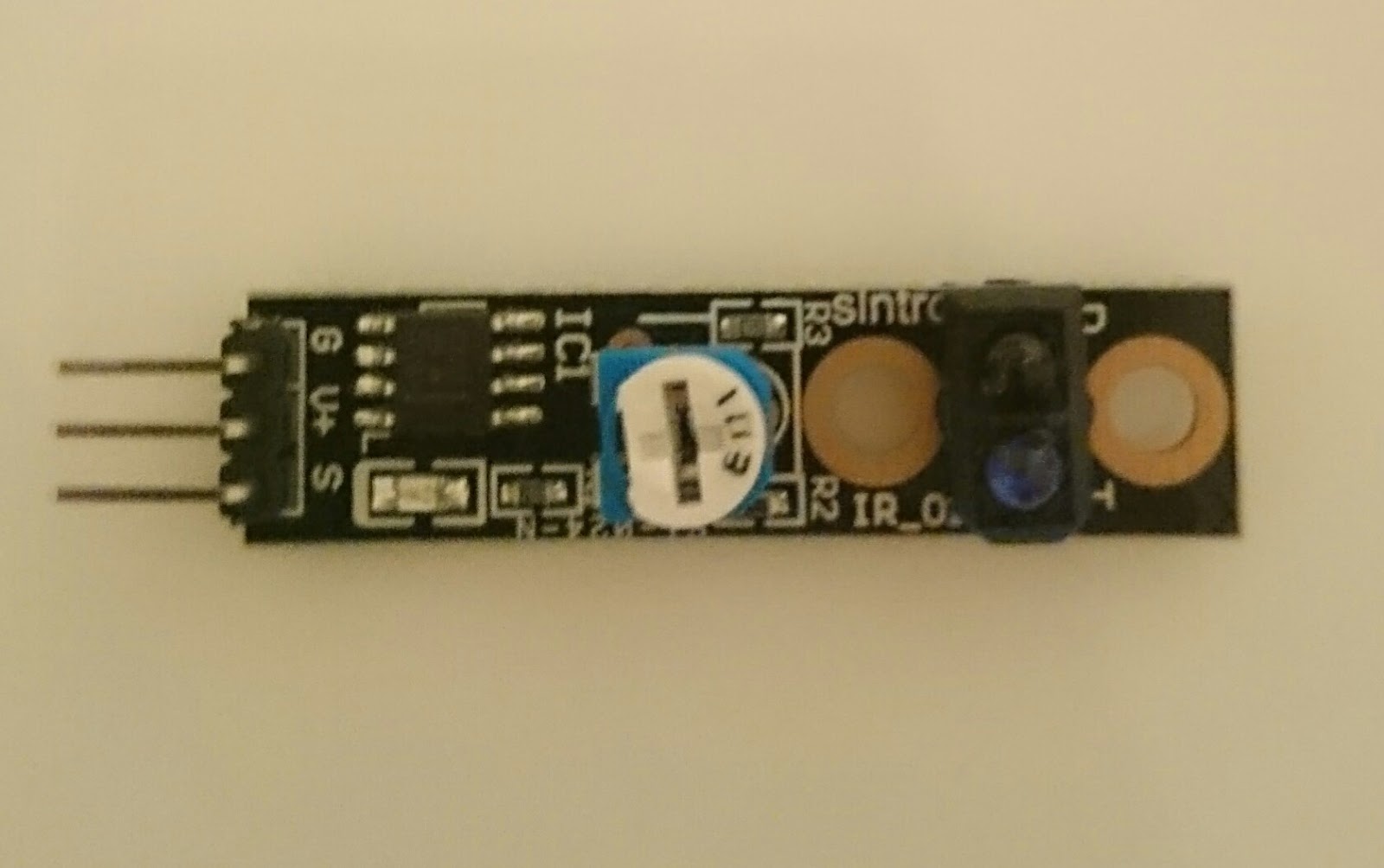
Für den Betrieb des Sensors muss man G mit dem Ground verbinden, S mit einem freien digital Pin des Arduino, und den letzten Pin mit den +5V des Arduino.
Der Sketch
Das Prinzip zum Folgen einer Linie ist sehr einfach: Sobald der Sensor weiß sieht, soll er nach links fahren, sobald der Sensor schwarz sieht nach rechts. Da der Roboter immer einen kurzen Verzug zwischen dem Betreten der schwarzen Linie und dem Erkennen im Sketch hat, wackelt der Roboter die schwarze Linie entlang.
Kurze Demonstration:
Je besser die Erkennung klappt, desto geringer fällt die Wackelung aus. Was jedoch zu beachten ist, ist, dass man die Geschwindigkeit nicht zu hoch einstellen darf, da der Roboter ansonsten die schwarze Linie überfährt, und sich so immer weiter nach links dreht, also sich im Kreis dreht.
Hier der Sketch zum Folgen einer Linie:
Keine Kommentare:
Kommentar veröffentlichen
Mit dem Veröffentlichen eines Kommentars erklären Sie sich mit unserer Datenschutzerklärung einverstanden.
https://michaelsarduino.blogspot.de/p/datenschutzerklarung.html