Um das Auto umzubauen muss man zunächst das gesamte Gehäuse entfernen, bis man an die Steuerungseinheit gelangt.

Nun muss man jeweils die beiden Verbindungskabel finden, welche den Antriebsmotor und den Steuerungsmotor steuern. Diese muss man jetzt von der Platine trennen und am besten mit einem Kabel verlöten, welches man in einen Breadboardkontakt einstecken kann. Die Platine erfüllt nun keine Funktion mehr und kann entfernt werden.
Zum Ansteuern der Motoren verwende ich den L293D Steuerungschip. Hier erfahrt ihr, wie ihr den L293D korrekt verbaut. Da die beiden Motoren jeweils mit 9V laufen, habe ich mich dazu entschieden für jeden Motor einen eigenen L293D zu verwenden. Dadurch hoffe ich, dass die Chips auch bei dieser Spannung/Stromstärke nicht durchbrennen, was bisher auch prima geklappt hat.
Zur Orientierung im Raum hat mein Roboter 4 Ultraschallsensoren, einen in jede Richtung. Außerdem habe ich ihm mittlerweile einen Lagesensor hinzugefügt, damit ich über die Sensorwerte Drehungen steuern kann. Die Verwendung eines Lagesensores, ist hier erklärt.
Das vergleichsweise Nervigste beim Bau des Roboters war die Stromversorgung. Das Auto hatte ursprünglich eine 12 V Batterie. Diese hat jedoch den L293D durchgebrannt. Deshalb habe ich mir einen 4 AA Batteriehalter und einen 2 AA Batteriehalter gekauft. Die Absicht dahinter war, dass ich den 4 AA Halter mit dem VIN Pin des Arduino verbinden(dadurch nur 1V Abwärme) und danach den 2 AA Halter mit dem 4 AA Halter verbinde um dadurch neun Volt für die Motoren zu erhalten. Das Problem bei dieser Lösung ist jedoch, dass die Energieversorgung des Arduino viel zu unstabil ist und sich deshalb der Arduino abschaltet und danach wieder anschaltet. Deshalb bin ich jetzt gezwungen die beiden Batteriehalter zusammen zu schließen und dann mit den stabilen 9V den Arduino und die Motoren zu versorgen.
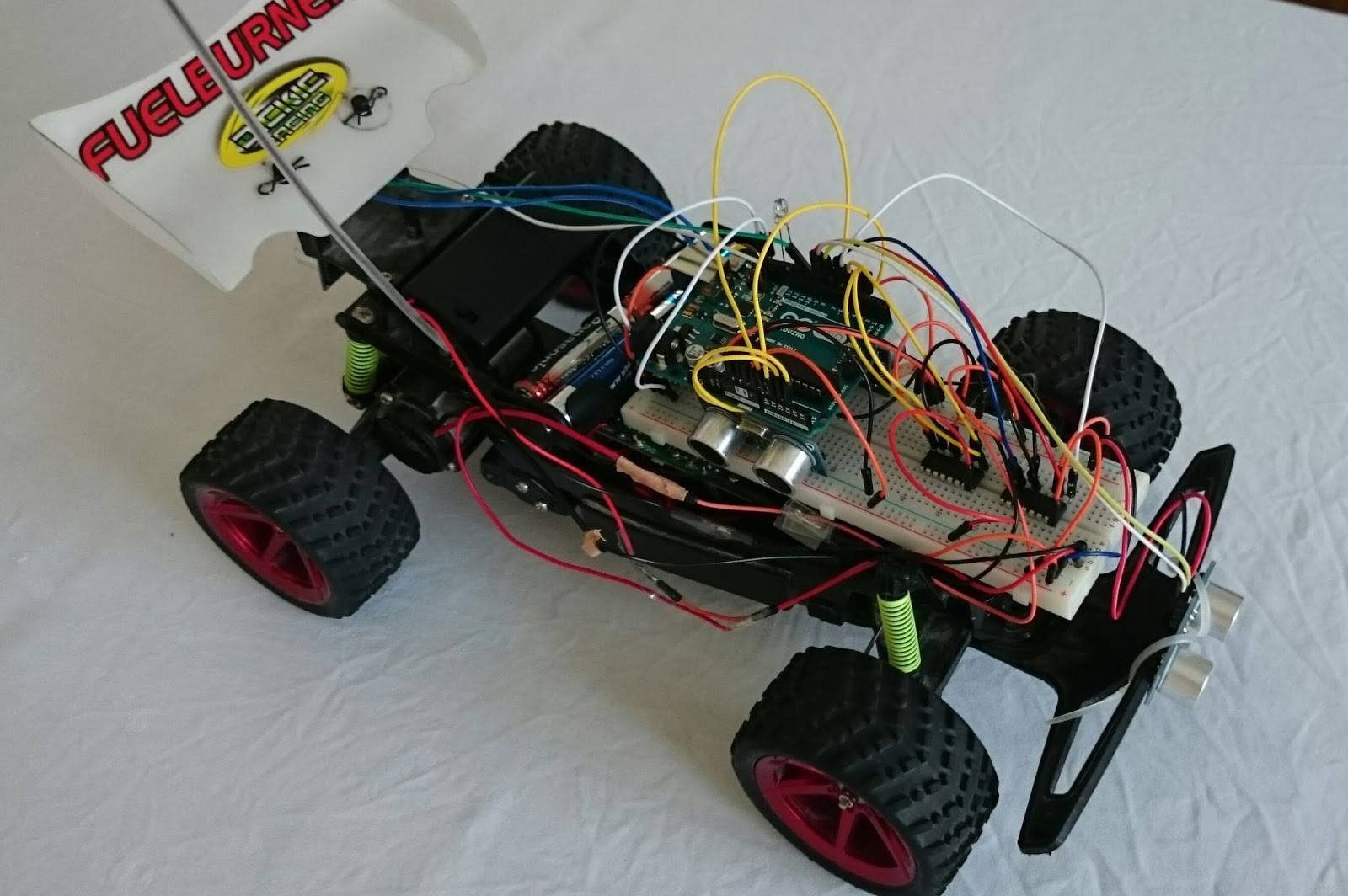
In einem kleinen Test fährt das Auto sehr stabil und vermeidet, dank der Sensoren, auch Wände/Objekte:
Was ich für den Anfang noch empfehlen würde, ist ein bis zwei LEDs anzubringen. Diese LEDs werden dann in einzelnen Programmabschnitten an beziehungsweise aus geschaltet. Dadurch versteht man auch als Betrachter des Autos, was das Auto gerade "denkt".
gerade "denkt".
Keine Kommentare:
Kommentar veröffentlichen
Mit dem Veröffentlichen eines Kommentars erklären Sie sich mit unserer Datenschutzerklärung einverstanden.
https://michaelsarduino.blogspot.de/p/datenschutzerklarung.html